O.S. MIDSEM by god
copy paste from diff. source
by Chetan yadav {god}


download link > Download
1 >>Components of Operating System
There are various
components of an Operating System to perform well defined tasks. Though most of
the Operating Systems differ in structure but logically they have similar
components. Each component must be a well-defined portion of a system that
appropriately describes the functions, inputs, and outputs.
There are following
8-components of an Operating System:
1.
Process Management
2.
I/O Device Management
3.
File Management
4.
Network Management
5.
Main Memory Management
6.
Secondary Storage
Management
7.
Security Management
8.
Command Interpreter
System
Following section
explains all the above components in more detail:
Process Management
A process is program
or a fraction of a program that is loaded in main memory. A process needs
certain resources including CPU time, Memory, Files, and I/O devices to
accomplish its task. The process management component manages the multiple
processes running simultaneously on the Operating System.
A program in running state is called a process.
The operating system
is responsible for the following activities in connection with process
management:
- Create, load, execute, suspend, resume, and terminate
processes.
- Switch system among multiple processes in main memory.
- Provides communication mechanisms so that processes can
communicate with each others
- Provides synchronization mechanisms to control
concurrent access to shared data to keep shared data consistent.
- Allocate/de-allocate resources properly to prevent or
avoid deadlock situation.
I/O Device Management
One of the purposes of
an operating system is to hide the peculiarities of specific hardware devices
from the user. I/O Device Management provides an abstract level of H/W devices
and keep the details from applications to ensure proper use of devices, to
prevent errors, and to provide users with convenient and efficient programming
environment.
Following are the
tasks of I/O Device Management component:
- Hide the details of H/W devices
- Manage main memory for the devices using cache, buffer,
and spooling
- Maintain and provide custom drivers for each device.
File Management
File management is one
of the most visible services of an operating system. Computers can store
information in several different physical forms; magnetic tape, disk, and drum
are the most common forms.
A file is defined as a
set of correlated information and it is defined by the creator of the file.
Mostly files represent data, source and object forms, and programs. Data files
can be of any type like alphabetic, numeric, and alphanumeric.
A files is a sequence of bits, bytes, lines or
records whose meaning is defined by its creator and user.
The operating system
implements the abstract concept of the file by managing mass storage device,
such as types and disks. Also files are normally organized into directories to
ease their use. These directories may contain files and other directories and
so on.
The operating system
is responsible for the following activities in connection with file management:
- File creation and deletion
- Directory creation and deletion
- The support of primitives for manipulating files and
directories
- Mapping files onto secondary storage
- File backup on stable (nonvolatile) storage media
Network Management
The definition of
network management is often broad, as network management involves several
different components. Network management is the process of managing and
administering a computer network. A computer network is a collection of various
types of computers connected with each other.
Network management comprises
fault analysis, maintaining the quality of service, provisioning of networks,
and performance management.
Network management is the process of keeping
your network healthy for an efficient communication between different
computers.
Following are the
features of network management:
- Network administration
- Network maintenance
- Network operation
- Network provisioning
- Network security
Main Memory Management
Memory is a large
array of words or bytes, each with its own address. It is a repository of
quickly accessible data shared by the CPU and I/O devices.
Main memory is a
volatile storage device which means it loses its contents in the case of system
failure or as soon as system power goes down.
The main motivation behind Memory Management
is to maximize memory utilization on the computer system.
The operating system
is responsible for the following activities in connections with memory
management:
- Keep track of which parts of memory are currently being
used and by whom.
- Decide which processes to load when memory space
becomes available.
- Allocate and deallocate memory space as needed.
Secondary Storage Management
The main purpose of a
computer system is to execute programs. These programs, together with the data
they access, must be in main memory during execution. Since the main memory is
too small to permanently accommodate all data and program, the computer system
must provide secondary storage to backup main memory.
Most modern computer
systems use disks as the principle on-line storage medium, for both programs
and data. Most programs, like compilers, assemblers, sort routines, editors,
formatters, and so on, are stored on the disk until loaded into memory, and
then use the disk as both the source and destination of their processing.
The operating system
is responsible for the following activities in connection with disk management:
- Free space management
- Storage allocation
Disk scheduling
Security Management
The operating system
is primarily responsible for all task and activities happen in the computer system.
The various processes in an operating system must be protected from each
other’s activities. For that purpose, various mechanisms which can be used to
ensure that the files, memory segment, cpu and other resources can be operated
on only by those processes that have gained proper authorization from the
operating system.Security Management refers to a mechanism for controlling the
access of programs, processes, or users to the resources defined by a computer
controls to be imposed, together with some means of enforcement.
Command Interpreter System
One of the most
important component of an operating system is its command interpreter. The
command interpreter is the primary interface between the user and the rest of
the system.Command Interpreter System executes a user command by calling one or
more number of underlying system programs or system calls.Command Interpreter
System allows human users to interact with the Operating System and provides
convenient programming environment to the users.
Many commands are
given to the operating system by control statements. A program which reads and
interprets control statements is automatically executed. This program is called
the shell and few examples are Windows DOS command window, Bash of Unix/Linux
or C-Shell of Unix/Linux.
Other Important Activities
An Operating System is
a complex Software System. Apart from the above mentioned components and
responsibilities, there are many other activities performed by the Operating
System. Few of them are listed below:
- Security −
By means of password and similar other techniques, it prevents
unauthorized access to programs and data.
- Control over system performance − Recording delays between request for a service
and response from the system.
- Job accounting −
Keeping track of time and resources used by various jobs and users.
- Error detecting aids −
Production of dumps, traces, error messages, and other debugging and error
detecting aids.
- Coordination between other softwares and users − Coordination and assignment of compilers,
interpreters, assemblers and other software to the various users of the
computer systems.
Types of O.S.
or here
STEps of process

1. New
A program which is going to be picked up by the OS into the main
memory is called a new process.
2. Ready
Whenever a process is created, it directly enters in the ready
state, in which, it waits for the CPU to be assigned. The OS picks the new
processes from the secondary memory and put all of them in the main memory.
The processes which are ready for the execution and reside in
the main memory are called ready state processes. There can be many processes
present in the ready state.
3. Running
One of the processes from the ready state will be chosen by the
OS depending upon the scheduling algorithm. Hence, if we have only one CPU in
our system, the number of running processes for a particular time will always
be one. If we have n processors in the system then we can have n processes
running simultaneously.
4. Block or wait
From the Running state, a process can make the transition to the
block or wait state depending upon the scheduling algorithm or the intrinsic
behavior of the process.
When a process waits for a certain resource to be assigned or
for the input from the user then the OS move this process to the block or wait
state and assigns the CPU to the other processes.
5. Completion or termination
When a process finishes its execution, it comes in the
termination state. All the context of the process (Process Control Block) will
also be deleted the process will be terminated by the Operating system.
6. Suspend ready
A process in the ready state, which is moved to secondary memory
from the main memory due to lack of the resources (mainly primary memory) is
called in the suspend ready state.
If the main memory is full and a higher priority process comes
for the execution then the OS have to make the room for the process in the main
memory by throwing the lower priority process out into the secondary memory.
The suspend ready processes remain in the secondary memory until the main
memory gets available.
7. Suspend wait
Instead of removing the process from the ready queue, it's
better to remove the blocked process which is waiting for some resources in the
main memory. Since it is already waiting for some resource to get available
hence it is better if it waits in the secondary memory and make room for the
higher priority process. These processes complete their execution once the main
memory gets available and their wait is finished.
A Process Scheduler
CHETAN YADAV
A Process Scheduler schedules different processes to be assigned
to the CPU based on particular scheduling algorithms. There are six popular
process scheduling algorithms which we are going to discuss in this chapter −
·
First-Come, First-Served
(FCFS) Scheduling
·
Shortest-Job-Next (SJN)
Scheduling
·
Priority Scheduling
·
Shortest Remaining Time
·
Round Robin(RR)
Scheduling
·
Multiple-Level Queues
Scheduling
These algorithms are either non-preemptive or preemptive.
Non-preemptive algorithms are designed so that once a process enters the
running state, it cannot be preempted until it completes its allotted time,
whereas the preemptive scheduling is based on priority where a scheduler may
preempt a low priority running process anytime when a high priority process
enters into a ready state.
First Come First Serve (FCFS)
·
Jobs are executed on
first come, first serve basis.
·
It is a non-preemptive,
pre-emptive scheduling algorithm.
·
Easy to understand and
implement.
·
Its implementation is
based on FIFO queue.
·
Poor in performance as
average wait time is high.

Wait time of each process is as follows −
|
Process |
Wait Time : Service Time - Arrival Time |
|
P0 |
0 - 0 = 0 |
|
P1 |
5 - 1 = 4 |
|
P2 |
8 - 2 = 6 |
|
P3 |
16 - 3 = 13 |
Average Wait Time: (0+4+6+13) / 4 = 5.75
Shortest Job Next (SJN)
·
This is also known
as shortest job first, or SJF
·
This is a
non-preemptive, pre-emptive scheduling algorithm.
·
Best approach to
minimize waiting time.
·
Easy to implement in
Batch systems where required CPU time is known in advance.
·
Impossible to implement
in interactive systems where required CPU time is not known.
·
The processer should
know in advance how much time process will take.
Given: Table of processes, and their Arrival time, Execution time
|
Process |
Arrival Time |
Execution Time |
Service Time |
|
P0 |
0 |
5 |
0 |
|
P1 |
1 |
3 |
5 |
|
P2 |
2 |
8 |
14 |
|
P3 |
3 |
6 |
8 |

Waiting time of each process is as follows −
|
Process |
Waiting Time |
|
P0 |
0 - 0 = 0 |
|
P1 |
5 - 1 = 4 |
|
P2 |
14 - 2 = 12 |
|
P3 |
8 - 3 = 5 |
Average Wait Time: (0 + 4 + 12 + 5)/4 = 21 / 4 = 5.25
Priority Based Scheduling
·
Priority scheduling is a
non-preemptive algorithm and one of the most common scheduling algorithms in
batch systems.
·
Each process is assigned
a priority. Process with highest priority is to be executed first and so on.
·
Processes with same
priority are executed on first come first served basis.
·
Priority can be decided
based on memory requirements, time requirements or any other resource
requirement.
Given: Table of processes, and their Arrival time, Execution time,
and priority. Here we are considering 1 is the lowest priority.
|
Process |
Arrival Time |
Execution Time |
Priority |
Service Time |
|
P0 |
0 |
5 |
1 |
0 |
|
P1 |
1 |
3 |
2 |
11 |
|
P2 |
2 |
8 |
1 |
14 |
|
P3 |
3 |
6 |
3 |
5 |
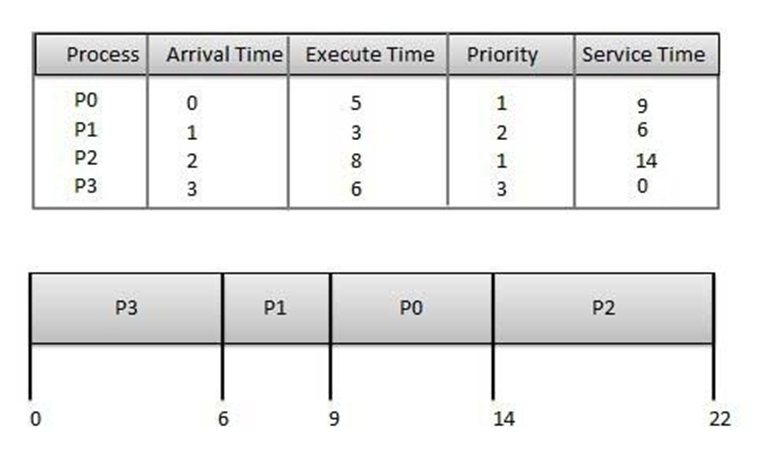
Waiting time of each process is as follows −
|
Process |
Waiting Time |
|
P0 |
0 - 0 = 0 |
|
P1 |
11 - 1 = 10 |
|
P2 |
14 - 2 = 12 |
|
P3 |
5 - 3 = 2 |
Average Wait Time: (0 + 10 + 12 + 2)/4 = 24 / 4 = 6
Shortest Remaining Time
·
Shortest remaining time
(SRT) is the preemptive version of the SJN algorithm.
·
The processor is
allocated to the job closest to completion but it can be preempted by a newer ready
job with shorter time to completion.
·
Impossible to implement
in interactive systems where required CPU time is not known.
·
It is often used in
batch environments where short jobs need to give preference.
Round Robin Scheduling
·
Round Robin is the preemptive
process scheduling algorithm.
·
Each process is provided
a fix time to execute, it is called a quantum.
·
Once a process is
executed for a given time period, it is preempted and other process executes
for a given time period.
·
Context switching is used
to save states of preempted processes.

Wait time of each process is as follows −
|
Process |
Wait Time : Service Time - Arrival Time |
|
P0 |
(0 - 0) + (12 - 3) = 9 |
|
P1 |
(3 - 1) = 2 |
|
P2 |
(6 - 2) + (14 - 9) + (20 - 17) = 12 |
|
P3 |
(9 - 3) + (17 - 12) = 11 |
Average Wait Time: (9+2+12+11) / 4 = 8.5
Multiple-Level Queues Scheduling
Multiple-level queues are not an independent scheduling algorithm.
They make use of other existing algorithms to group and schedule jobs with
common characteristics.
·
Multiple queues are maintained
for processes with common characteristics.
·
Each queue can have its
own scheduling algorithms.
·
Priorities are assigned
to each queue.
For example, CPU-bound jobs can be scheduled in one queue and all
I/O-bound jobs in another queue. The Process Scheduler then alternately selects
jobs from each queue and assigns them to the CPU based on the algorithm
assigned to the queue.
fragmentation //Contiguous memory allocation// Demand Paging //What is a Page Fault?//
Swapping
Contiguous memory allocation is a method of allocating memory where a
single block of memory is set aside for a particular purpose, such as storing
data for an array. In this type of allocation, the memory locations for the
block of memory are adjacent to each other, hence the name "contiguous."
Contiguous memory allocation is often used when a large block of
memory is needed for a particular purpose, such as when storing a large array.
One advantage of this type of allocation is that it can be accessed
efficiently, as the memory locations are adjacent to each other. However, it
can be more difficult to manage than non-contiguous allocation, as it requires
more careful planning to ensure that there is enough contiguous memory
available for the desired purpose.
The
conditions of fragmentation depend on the memory allocation system. As the
process is loaded and unloaded from memory, these areas are fragmented into
small pieces of memory that cannot be allocated to incoming processes. It is
called fragmentation.
Swapping is a process of swapping a process
temporarily to a secondary memory from the main memory which is fast than
compared to secondary memory. But as RAM is of less size so the process that is inactive is
transferred to secondary memory.
Demand Paging
there is a
concept called Demand Paging is introduced. It suggests keeping all pages of
the frames in the secondary memory until they are required. In other words, it
says that do not load any page in the main memory until it is required.
What is a Page Fault?
If the referred page is not present in the
main memory then there will be a miss and the concept is called Page miss or
page fault.
The CPU has to access the missed page from the
secondary memory. If the number of page fault is very high then the effective
access time of the system will become very high.
Deadlock in OS | Scaler Topics
Chetan Yadav
What is Deadlock in OS?
All the processes in a
system require some resources such as central processing unit(CPU), file
storage, input/output devices, etc to execute it. Once the execution is
finished, the process releases the resource it was holding. However, when many
processes run on a system they also compete for these resources they require
for execution. This may arise a deadlock situation.
A deadlock is a situation in which more than one
process is blocked because it is holding a resource and also requires some
resource that is acquired by some other process. Therefore, none of the
processes gets executed.
Neccessary Conditions for Deadlock
The four necessary
conditions for a deadlock to arise are as follows.
- Mutual Exclusion: Only one process can use a resource at any given time
i.e. the resources are non-sharable.
- Hold and wait: A process is holding at least one resource at a time
and is waiting to acquire other resources held by some other process.
- No preemption: The resource can be released by a process voluntarily
i.e. after execution of the process.
- Circular Wait: A set of processes are waiting for each other in a
circular fashion. For example, lets say there are a set of processes
{P_0P0,P_1P1,P_2P2,P_3P3} such that P_0P0 depends
on P_1P1, P_1P1 depends
on P_2P2, P_2P2 depends
on P_3P3 and P_3P3 depends on P_0P0. This
creates a circular relation between all these processes and they have to
wait forever to be executed.
Example

Methods of Handling Deadlocks in Operating System
The first two methods
are used to ensure the system never enters a deadlock.
Deadlock Prevention
This is done by
restraining the ways a request can be made. Since deadlock occurs when all the
above four conditions are met, we try to prevent any one of them, thus
preventing a deadlock.
Deadlock Avoidance
When a process
requests a resource, the deadlock avoidance algorithm examines the
resource-allocation state. If allocating that resource sends the system into an
unsafe state, the request is not granted.
Therefore, it requires
additional information such as how many resources of each type is required by a
process. If the system enters into an unsafe state, it has to take a step back
to avoid deadlock.
Deadlock Detection and Recovery
We let the system fall
into a deadlock and if it happens, we detect it using a detection algorithm and
try to recover.
Some ways of recovery are as follows.
- Aborting all the deadlocked processes.
- Abort one process at a time until the system recovers
from the deadlock.
- Resource Preemption: Resources are taken one by one
from a process and assigned to higher priority processes until the
deadlock is resolved.
Methods of Handling Deadlocks in Operating System
The first two methods
are used to ensure the system never enters a deadlock.
Deadlock Prevention
This is done by
restraining the ways a request can be made. Since deadlock occurs when all the
above four conditions are met, we try to prevent any one of them, thus
preventing a deadlock.
Deadlock Avoidance
When a process
requests a resource, the deadlock avoidance algorithm examines the
resource-allocation state. If allocating that resource sends the system into an
unsafe state, the request is not granted.
Therefore, it requires
additional information such as how many resources of each type is required by a
process. If the system enters into an unsafe state, it has to take a step back
to avoid deadlock.
Deadlock Detection and Recovery
We let the system fall
into a deadlock and if it happens, we detect it using a detection algorithm and
try to recover.
Some ways of recovery are as follows.
- Aborting all the deadlocked processes.
- Abort one process at a time until the system recovers
from the deadlock.
- Resource Preemption: Resources are taken one by one
from a process and assigned to higher priority processes until the
deadlock is resolved.
Methods of Handling Deadlocks in Operating System
The first two methods
are used to ensure the system never enters a deadlock.
Deadlock Prevention
This is done by
restraining the ways a request can be made. Since deadlock occurs when all the
above four conditions are met, we try to prevent any one of them, thus
preventing a deadlock.
Deadlock Avoidance
When a process
requests a resource, the deadlock avoidance algorithm examines the
resource-allocation state. If allocating that resource sends the system into an
unsafe state, the request is not granted.
Therefore, it requires
additional information such as how many resources of each type is required by a
process. If the system enters into an unsafe state, it has to take a step back
to avoid deadlock.
Deadlock Detection and Recovery
We let the system fall
into a deadlock and if it happens, we detect it using a detection algorithm and
try to recover.
Some ways of recovery are as follows.
- Aborting all the deadlocked processes.
- Abort one process at a time until the system recovers
from the deadlock.
- Resource Preemption: Resources are taken one by one
from a process and assigned to higher priority processes until the
deadlock is resolved.


Comments
Post a Comment